Đánh giá nhỏ Pimoroni Inventor HAT: Tuyệt vời để chế tạo rô-bốt
Phát minh không bao giờ là dễ dàng, nhưng có vẻ như Pimoroni đang trên đà thắng lợi. Bo mạch mới nhất của công ty, Inventor HAT Mini trị giá 24 USD tuân theo triết lý thiết kế của bo mạch “pHAT”, bo mạch bổ trợ được thiết kế cho Raspberry Pi Zero 2 W và những người tiền nhiệm của nó. Nó cũng có thể được sử dụng với Model B quả mâm xôichẳng hạn như mâm xôi Pi 4nếu một người sử dụng phần mở rộng tiêu đề.
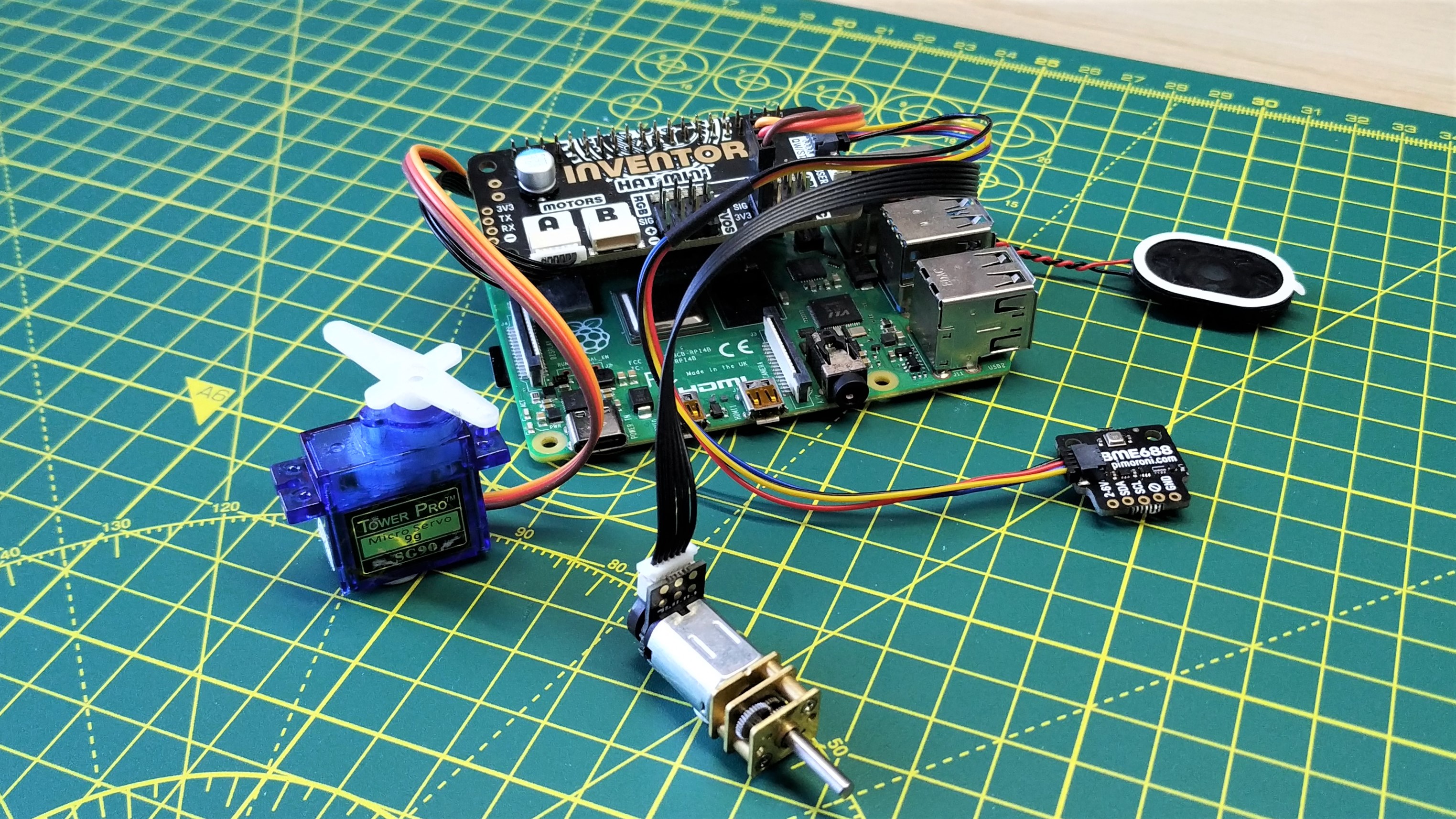
Bo mạch nhỏ gọn này có một loạt đầu ra cho động cơ servo, GPIO, động cơ, cảm biến, giao tiếp nối tiếp và tất nhiên có tám đèn LED RGB sáng.
Nó có thể là một ứng cử viên cho danh sách của chúng tôi về MŨ Raspberry Pi tốt nhất? Để tìm hiểu điều đó và để tìm hiểu thêm về những gì bảng này có thể làm, chúng tôi đặt nó lên bàn và xem nó hoạt động như thế nào.
Thông số kỹ thuật của Inventor HAT Mini
Vuốt để cuộn theo chiều ngang
| Chân GPIO | 4 x Chân servo sở thích |
| 4 x chân GPIO chung | |
| Bộ điều khiển động cơ | Trình điều khiển động cơ cầu H kép DRV8833 |
| 2 đầu nối JST-SH | |
| Đầu nối động cơ 2 x 2 pin (mặt dưới của bo mạch) | |
| âm thanh | Bộ khuếch đại mono MAX98357 3.2W I2S |
| Đầu nối loa 2 chấu | |
| đèn LED | 8 đèn LED RGB WS2812 / NeoPixel |
| Đầu vào | nút người dùng |
| GPIO | Tiêu đề 40 pin xuyên qua |
| 1 x đầu nối QW/ST (Stemma QT / Qwiic) | |
| kích thước | 65×30.5×15.5mm |
Thiết lập Inventor HAT Mini
Inventor HAT Mini có kết nối tiêu đề khác với hầu hết các HAT (ngoại trừ Sense HAT). HAT có thể đi qua các chân GPIO để có thể kết nối một bo mạch khác ở trên cùng. Bạn sẽ cần các tiêu đề dài hơn để thực hiện điều này và một số miếng đệm M2.5 sẽ hữu ích để cung cấp độ cứng.
Nếu định sử dụng riêng Inventor HAT Mini thì bạn có thể trượt HAT xuống GPIO của Raspberry Pi. Đối với người dùng Raspberry Pi Zero, tất cả đều tốt, nhưng nếu bạn định sử dụng bất kỳ Raspberry Pi nào khác, hãy chú ý đến khoảng trống cho QW/ST và kết nối âm thanh hoặc chỉ sử dụng tiêu đề mở rộng. Lý do cho việc truyền qua là bộ vi điều khiển Nuvoton MS51TC0AE cung cấp giao diện cho các chân servo và GPIO. Điều này giải phóng rất nhiều chân trên Raspberry Pi và điều đó có nghĩa là chúng ta có thể xếp một bảng khác lên trên Inventor HAT Mini.
Quá trình cài đặt phần mềm được ghi lại đầy đủ trên kho lưu trữ Github của Pimoroni. Nó không dễ dàng như các bảng Pimoroni khác sử dụng trình cài đặt tự động, có nghĩa là, các bước rõ ràng và không mất quá nhiều thời gian để hoàn tất cài đặt.
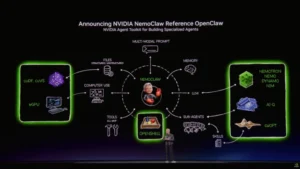
Các chân hiện diện trên bảng được nhóm thành hai phần. Đầu tiên là dành cho các động cơ theo sở thích, chẳng hạn như SG90. Các servo sở thích có sơ đồ chân cụ thể, Tín hiệu, Điện áp, GND (SVG) và đã được phục vụ cho Inventor HAT Mini vì mỗi kênh servo có sơ đồ chân SVG riêng.
Chỉ cần đảm bảo rằng đầu nối GND (màu đen) nằm trên chân GND và bạn đã sẵn sàng để sử dụng. Nếu bạn hiểu sai, không vấn đề gì, tôi đã làm và không có gì xảy ra. Chỉ cần sửa kết nối và mọi thứ đều tốt. Dãy chân GPIO thứ hai là bốn chân chung cũng tuân theo sơ đồ chân SVG. Mỗi chân tín hiệu đều là chân kỹ thuật số và tương tự, tính linh hoạt này có nghĩa là chúng có thể được sử dụng để nhấp nháy đèn LED, rơle kích hoạt và đọc các thiết bị điện tử tương tự. Một nút người dùng được đặt ngay bên cạnh các chân GPIO và nút này là một đầu vào đơn giản cho các dự án của người dùng.

Ngay phía trên cả hai dãy chân GPIO là tám WS2812 NeoPixels. Những đèn LED nhỏ này được điều khiển dễ dàng bằng mô-đun Python tùy chỉnh và có thể được điều khiển theo nhóm hoặc riêng lẻ.
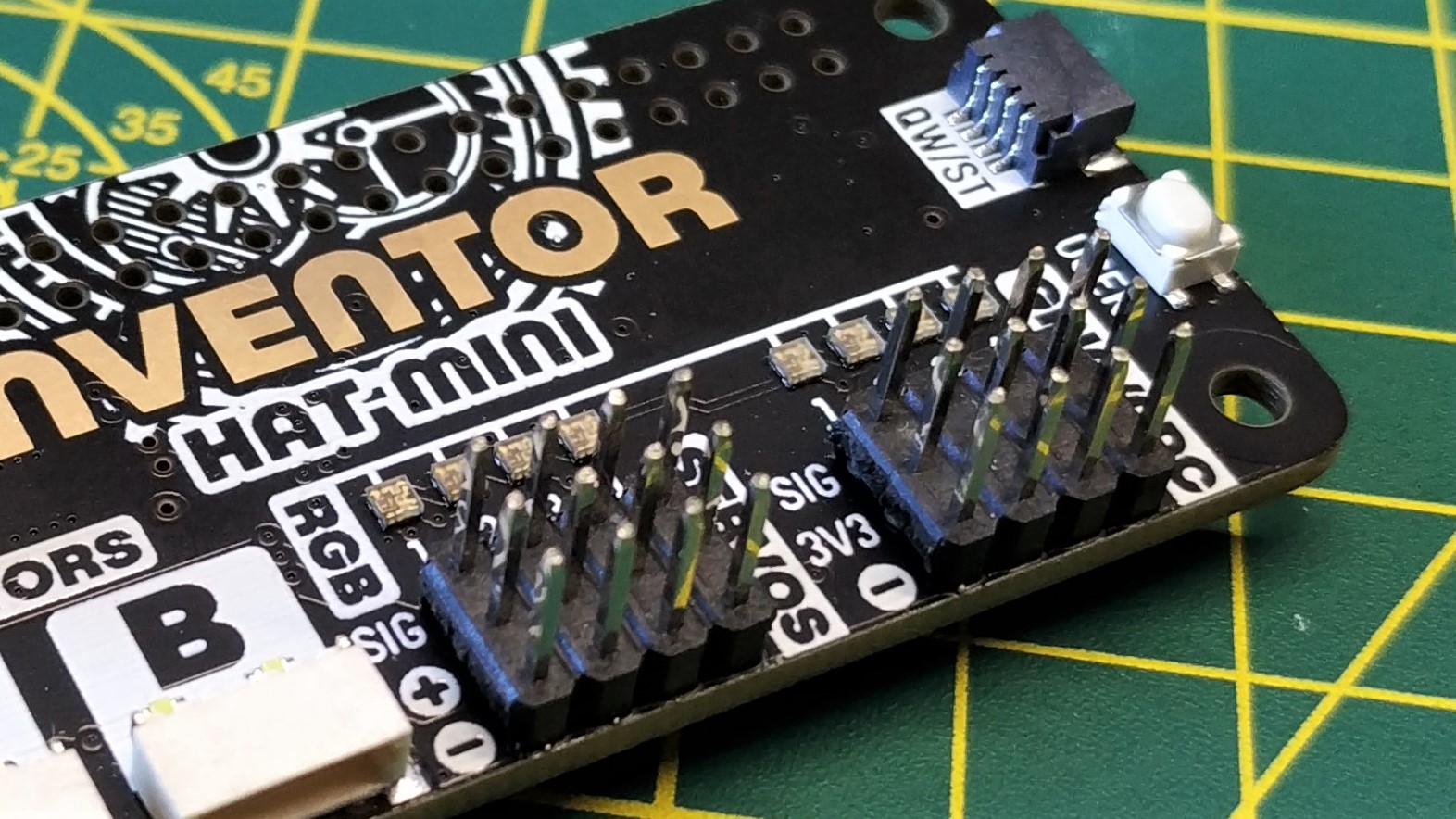
Bây giờ trọng tâm của chúng tôi chuyển sang các kết nối đặt riêng trên chu vi của bảng. Ở trên cùng bên phải là đầu nối QW/ST. Đây là tên của Pimoroni cho Đầu nối Stemma QT / Qwiic và đầu nối này tương thích với tất cả các thành phần sử dụng nó. Chúng tôi đã có một danh sách các tiện ích bổ sung Stemma QT / Qwiic tốt nhất mà bạn có thể mua để thêm chức năng bổ sung cho bảng. Tôi đã kết nối cảm biến nhiệt độ và độ ẩm BME688, sau đó cài đặt mô-đun Python tương ứng. Trong giây lát, nhiệt độ của văn phòng tôi cuộn xuống màn hình.
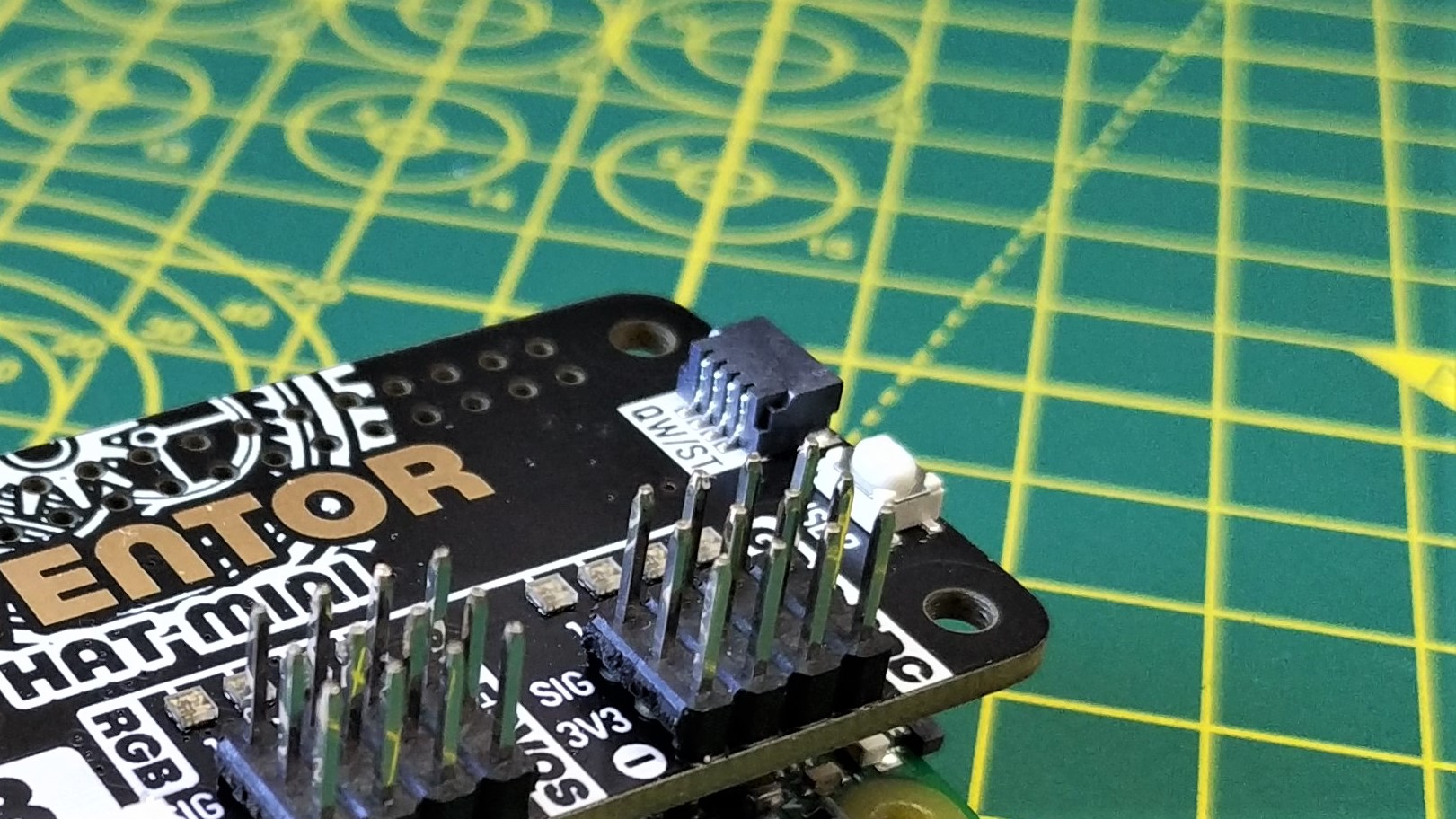
Bên dưới các chữ cái A và B là hai đầu nối JST-SH sáu chân để sử dụng với các động cơ DC tương thích. Những động cơ này trông giống như động cơ kim loại bánh răng siêu nhỏ 6V DC thông thường, nhưng có đầu nối sáu chân JST-SH chỉ có thể được cắm theo một chiều. Những đầu nối này rất hữu ích, nhưng bạn cần mua hệ thống để nó hoạt động. Nếu bạn đã có một kho động cơ DC hai chân điển hình, thì bạn sẽ thấy các kết nối tương ứng ở mặt dưới của bo mạch. Thoạt nhìn, tôi đã bỏ lỡ những đầu nối này.
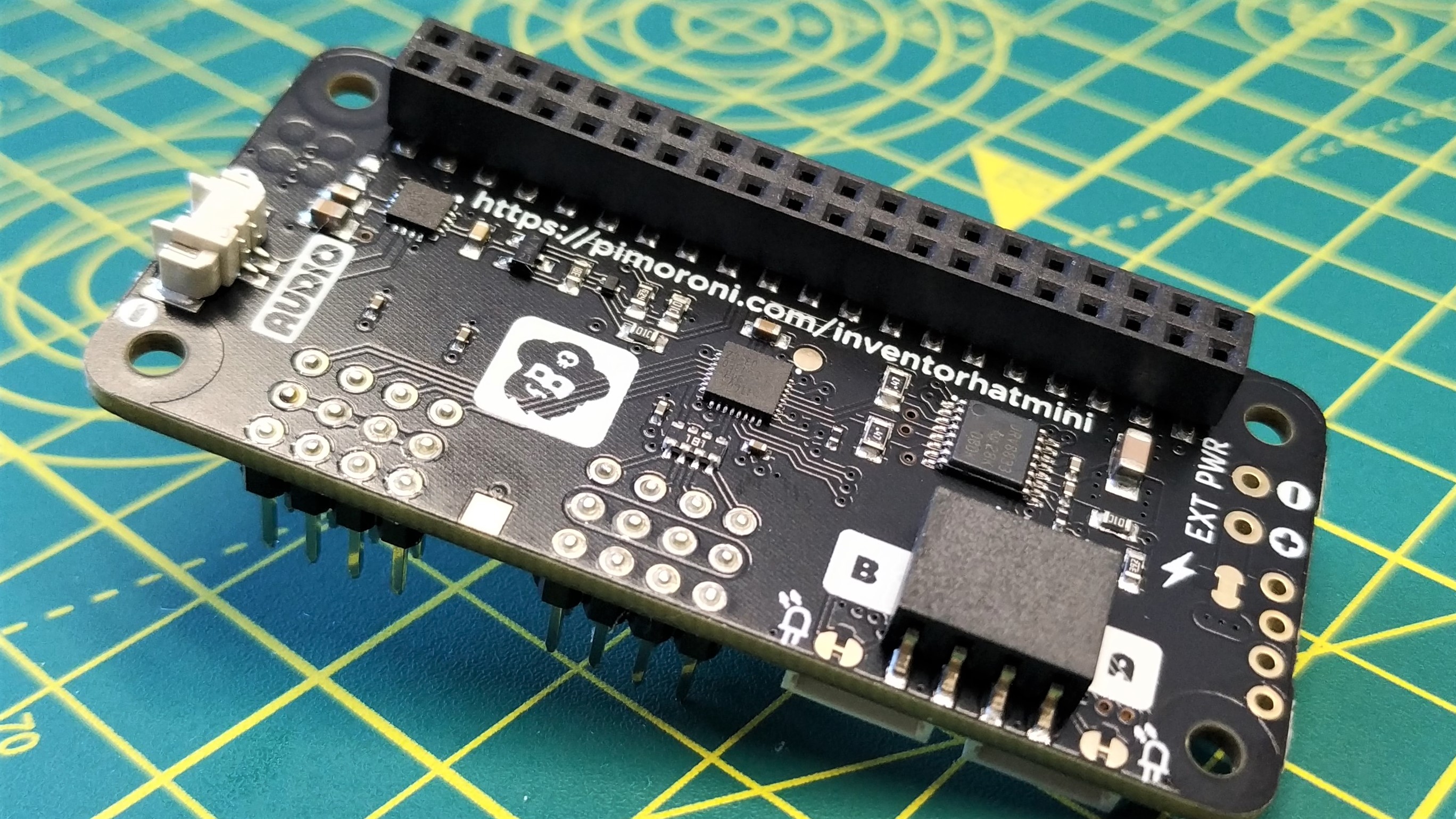
Ngoài ra, ở mặt dưới của bo mạch là kết nối âm thanh hai chân cho một loa nhỏ. Bộ khuếch đại đơn âm MAX98357 3.2W I2S không chỉ có khả năng tạo ra âm thanh chất lượng tốt. Đây không phải là hệ thống âm thanh được chứng nhận THX, mà là một cách dễ thương hơn để tạo ra tiếng ồn rõ ràng.
Đối với người dùng nâng cao, có một loạt tiêu đề bổ sung, không phổ biến ở cả hai mặt của bảng. Trên đầu bo mạch là các tiêu đề dành cho giao tiếp nối tiếp (TX / RX), cũng có thể được sử dụng với cảm biến khoảng cách siêu âm tuân thủ 3,3V (HC-SR04P hoặc HC-SR04+). Có thể sử dụng một bộ header khác để cấp nguồn cho bo mạch, lưu ý mỗi lần chỉ nên sử dụng một nguồn điện duy nhất. Nếu bạn muốn chỉ cấp nguồn cho động cơ / động cơ servo, có một dấu vết mà khi cắt, sẽ cách ly Pi khỏi nguồn điện của động cơ.
Sử dụng Inventor HAT Mini
Mô-đun Python đi kèm với Inventor HAT Mini là mức chất lượng thông thường. Tôi đã sử dụng bảng Pimoroni từ năm 2013 (Pibrella là bảng đầu tiên) và tôi có thể thấy rằng chất lượng đã hoàn thiện, nhưng sự chú ý đến từng chi tiết của Pimoroni vẫn rất sắc nét. Các mô-đun Python của nó trừu tượng hóa sự phức tạp cho người học và cung cấp một phương tiện nhanh chóng để làm cho một dự án hoạt động.
Nếu bạn chưa quen với viết mã, điện tử, robot và bạn gặp phải những rào cản đối với việc học của mình, bạn sẽ dễ dàng mất tự tin và bỏ cuộc. Trừu tượng hóa sự phức tạp có nghĩa là người học có thể ghi được “chiến thắng nhanh chóng” và thấy sự tự tin của họ tăng lên khi họ giải quyết thử thách tiếp theo. Tôi thích cách bố trí của bảng. Chắc chắn rằng vị trí của Stemma QT và các kết nối âm thanh rất khó xử khi được sử dụng với Raspberry Pi Model B, nhưng không có gì mà tiêu đề mở rộng không thể khắc phục được. Các tùy chọn kết nối được sắp xếp để tận dụng tối đa yếu tố hình thức. Tôi muốn nhìn thấy các đầu vào cảm ứng điện dung, giống như Explorer HAT Pro có trong danh sách các HAT tốt nhất dành cho Raspberry Pi của chúng tôi, nhưng điều đó sẽ chiếm quá nhiều dung lượng.
Điều khiển động cơ và servo là tuyệt vời, phần lớn nhờ vào ảnh hưởng của Kỹ sư sản phẩm của Pimoroni, Tiến sĩ Chris Parrott, điều này đã được thấy trong các sản phẩm tập trung vào rô-bốt khác của Pimroroni. Stemma QT (QW/ST) luôn được chào đón để kết nối nhanh chóng và dễ dàng. Và ai có thể chống lại đèn LED RGB nhỏ trên bảng? Rốt cuộc họ là nhà sản xuất kẹo!
dòng dưới cùng

Nhà phát minh HAT Mini trị giá 24 đô la của Pimoroni dường như là sự kế thừa tinh thần cho dòng bo mạch Explorer HAT lâu đời của nó. Tôi thấy rõ điều này sau khi sử dụng Explorer HAT Pro trong gần 9 năm. Bảng được thiết kế tốt, các tính năng được cân nhắc kỹ lưỡng và phần mềm sử dụng đơn giản. Nếu bạn là người dùng Raspberry Pi Zero, thì bảng nhỏ này sẽ là bộ điều khiển rô-bốt được lựa chọn. Người dùng Raspberry Pi Model 3B / 4B, hãy mua một số tiêu đề mở rộng khi bạn nhận được một trong những tiêu đề này và bạn sẽ không gặp vấn đề gì với việc giải phóng mặt bằng USB / Ethernet. Đây là một bảng tuyệt vời rất thú vị để sử dụng.